QuickLogic / QORC Quickfeather Devkit
2021-02-04This year at LinuxConfAU I got to see Tim Saxe and Brian Faith’s talk on the new QORC (QuickLogin Open Reconfigurable Computing) SoC, and how they came to develop an open source toolchain.
I got in touch with them to request some sample hardware, and a couple of weeks later, here it is!
QuickFeather Dev Kit
The QuickFeather devkit is quite interesting: the footprint is mostly compatible with the Adafruit Feather series of devices, but double-sided rather than stacking headers and some extra header pins on the top. Like the Feather boards, there’s a LiPo controller build in, but on this board there’s also a bunch of sensors (accelerometer, pressure sensor, MEMS mic).
 QuickLogic QuickFeather next to an Adafruit Feather nRF52832
QuickLogic QuickFeather next to an Adafruit Feather nRF52832
The board is a bit longer than a regular feather, with another 16 pin I/O connector on the end. It’s advertised as “compatible with 0.1” breadboards” but with those extra pins populated it will no longer fit in a normal breadboard unless you hang those off the end of the board.
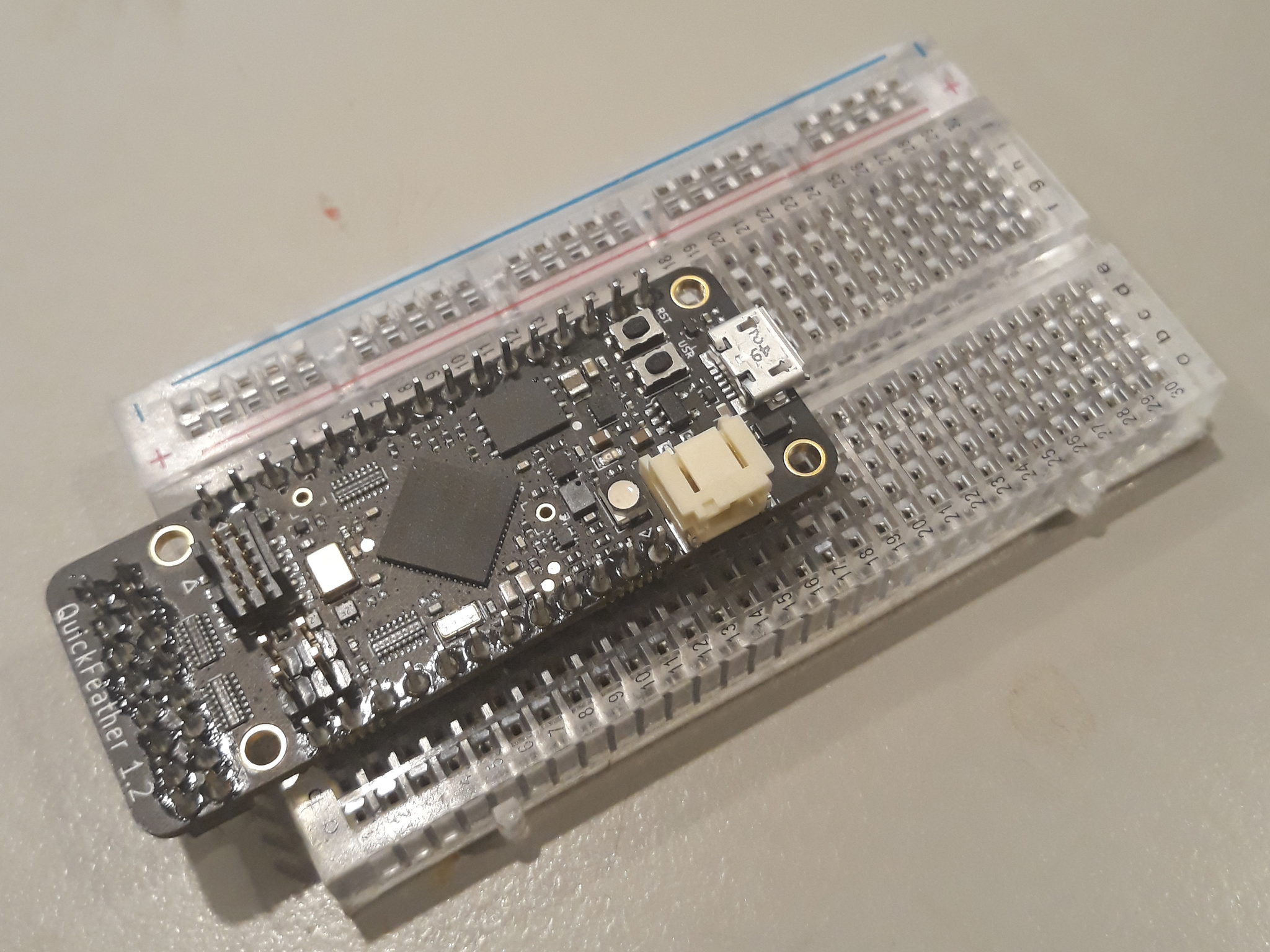 QuickLogic QuickFeather in a breadboard
QuickLogic QuickFeather in a breadboard
Without stacking headers you can’t put FeatherWings on top of it but it’d potentially work well on top or with FeatherWing Doubler.
For better Feather compatibility, I’d suggest using stackable headers in the ‘standard’ feather pins positions, and moving the extra 16 pins to be in line with those but leave them unpopulated. Possibly even add some little holes to make it easy to snap the extra bit off for 100% feather compatibility, a bit like the ESPea32.
(or like the QOMU for that matter)
The chip runs at 3.3V (or at least, that’s the supply voltage on this board, it’ll run down to 1.8V). You can see from the schematic that all the dev kit I/O pins have 22 ohm series resistors on them, which is nice to limit the chaos if you accidentally connect 5V logic to any of these pins.
IO, GPIO, FBIO
It’s kind of confusing just how many kinds of I/O there are. The QuickLogic EOS S3 datasheet includes a table (Table 31, Page 98) of how the pins are related.
- IO_N : One of the 46 physical pins (or pad) on the chip.
- GPIO(N) : One of the 8 logical I/O addresses on the ARM core
- FBIO_N : An interface to the FPGA.
The I/O Multiplexor (see the QuickLogic EOS S3 Multiplexor User Guide](https://www.quicklogic.com/wp-content/uploads/2020/06/QL-EOS-S3-Sensor-Processing-Platform-IOMUX-User-Guide.pdf) ) switches each IO Pin between GPIO, FBIO and various special purpose peripherals.
There’s a lot I haven’t worked out yet.
Plugging in In
(See also QuickFeather Development Kit User Guide)
USB
On plugging it in with USB to a Linux machine and resetting the board with the “reset” button,
the LED flashes blue and then it appears as 1d50:6140 OpenMoko, Inc..
It’s a standard cdc_acm device so it appears in Linux as /dev/ttyACM0.
It doesn’t stick around for long though, after
a few seconds without connecting the board seems to disconnect.
As shipped there’s a little diagnostic tool on the flash which lets you turn the LEDs on and off, but to actually do much with this board you need a SWD programmer such as a Segger J-link with a teeny 0.05” pitch connector. Something like this.
SWD / J-Link
There’s a 0.05” SWD header on the top, so we might as well try that out too.
Two shorting headers need to be installed (J1 and J7), the SWD cable attached
to J6 and power provided by battery or USB.
The drivers for the J-link device are available in the Ubuntu jlink package.
Try to remember they have weird capitalized names like JLinkExe.
At this point we can have a little conversation:
$ JLinkExe
SEGGER J-Link Commander V6.40 (Compiled Oct 26 2018 15:08:38)
DLL version V6.40, compiled Oct 26 2018 15:08:28
Connecting to J-Link via USB...O.K.
Firmware: J-Link EDU Mini V1 compiled Jan 7 2019 14:01:42
Hardware version: V1.00
S/N: 801001970
License(s): GDB, FlashBP
VTref=3.294V
Type "connect" to establish a target connection, '?' for help
J-Link>device cortex-m4
J-Link>si swd
Selecting SWD as current target interface.
J-Link>speed 4000
Selecting 4000 kHz as target interface speed
J-Link>connect
Device "CORTEX-M4" selected.
Connecting to target via SWD
Found SW-DP with ID 0x2BA01477
Scanning AP map to find all available APs
AP[1]: Stopped AP scan as end of AP map has been reached
AP[0]: AHB-AP (IDR: 0x24770011)
Iterating through AP map to find AHB-AP to use
AP[0]: Core found
AP[0]: AHB-AP ROM base: 0xE00FF000
CPUID register: 0x410FC241. Implementer code: 0x41 (ARM)
Found Cortex-M4 r0p1, Little endian.
FPUnit: 6 code (BP) slots and 2 literal slots
CoreSight components:
ROMTbl[0] @ E00FF000
ROMTbl[0][0]: E000E000, CID: B105E00D, PID: 000BB00C SCS-M7
ROMTbl[0][1]: E0001000, CID: B105E00D, PID: 003BB002 DWT
ROMTbl[0][2]: E0002000, CID: B105E00D, PID: 002BB003 FPB
ROMTbl[0][3]: E0000000, CID: B105E00D, PID: 003BB001 ITM
ROMTbl[0][4]: E0040000, CID: B105900D, PID: 000BB9A1 TPIU
Cortex-M4 identified.
J-Link>i
JTAG Id: 0x2BA01477 Version: 0x2 Part no: 0xba01 Man. Id: 023B
J-Link>qc
This interface can be used to load software onto both the Cortex M4 CPU and the FPGA.
Symbiflow
Symbiflow is an Open Source FPGA toolchain which supports many FPGA families including the QuickLogic EOS used by this board. It’s not available as a Ubuntu package yet so we’re in “clone and build” territory.
Maybe don’t try this on a limited bandwidth link, there’s a lot of submodules to load.
When I was messing around with Symbiflow last time I didn’t achieve much on my stated aims but I did work out a much (subjectively) nicer way to build stuff, without conda or apio or litex-buildenv, so I might have to work that out again.