Ciril: Cubic Inch Robots in Labs
2016-03-20For updates, see the Ciril Project Page
The ESP8266 opens up new possibilities for hardware design of educational robots. This project aims to put together an open hardware design compatible with the Flobot project and also projects such as NodeMCU.
I’ve started a Ciril project on Github for this which has more information and which I’ll update as I go along.
Why so small?
The eventual aim is for dimensions of approximately 1 cubic inch (25 x 25 x 25 mm = 16 cubic centimeters), but the immediate goal is approximately 40 x 40 x 40 mm (4 cubic inches).
The intention is to be a size which is easy for a small child to pick up one-handed and which is small enough to explore line following and so on experiments on a desktop sized platform (approx 1m\^2)
Prototype
The prototype uses two 10mm stepper motors (from Ebay), along with four L9110S to drive them. There’s also a NodeMCU in the box, with an ESP-12E module on board. And Lego wheels.

The kinematics need a lot of work, but I’m amazed by how much torque the tiny motors have …
Alternatives
Direct driving the wheels is a bit … minimalist. The size of tyre they’re able to drive is very limited and the stub axle is under a lot of load.
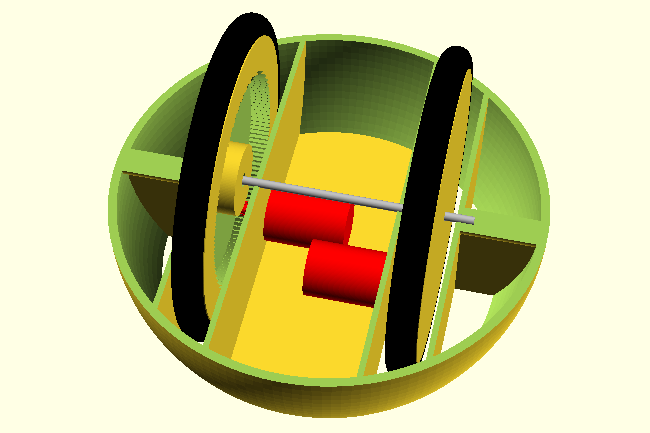
As an alternative, perhaps 3D-printed wheels with an internal gear and an O-ring groove around the outside. They take up a lot of room internally, but perhaps the axle could be offset downwards and the wheels made a little smaller.
The motors can also be offset to make a bit more room. The wasted ‘cheeks’ on either side of the wheels could be occupied by LiPo cells.